
Ապրանքներ








YST-115 Multi-Joint Manipulator Robot
Կարճ նկարագրություն.
Multi-Joint Manipulator Robot պարամետր
ծանրաբեռնվածություն՝ 150 կգ
արագություն՝ 10-12S/շրջանակ
Z առանցքով ճանապարհորդություն՝ 1500 մմ
Y առանցքի երթևեկությունը՝ 2000 մմ
α առանցքը (ձախ և աջ) ճանապարհորդություն՝ 330°
ճշգրտությունը՝ ± 1 մմ
հզորությունը՝ 15 կՎտ
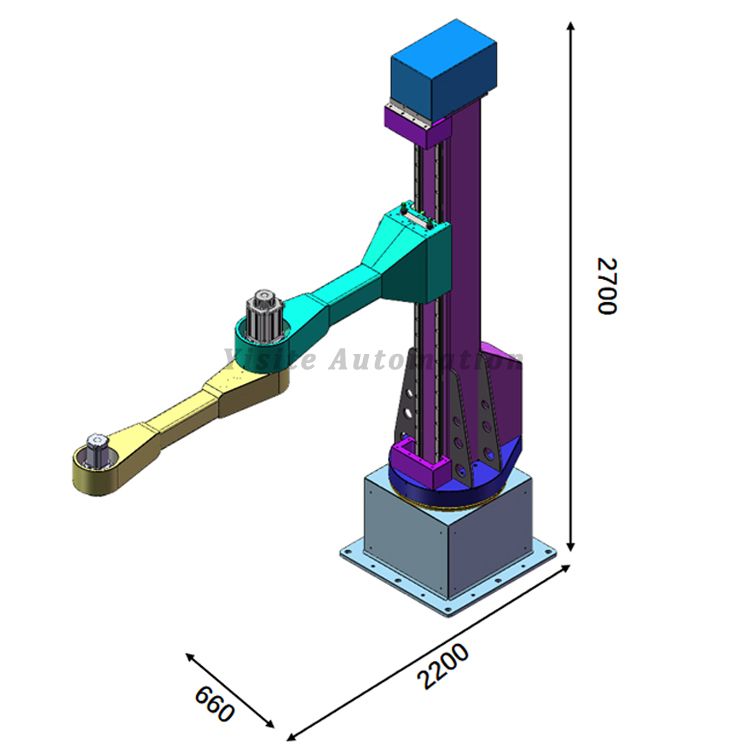
Չափսը՝ 2700x2200x660 մմ
Քաշը՝ 550 կգ






մեր մասին

Մենք պրոֆեսիոնալ հարմարեցված ավտոմատացման սարքավորումներ արտադրող ենք: Մեր արտադրանքը ներառում է depalletizer, pick and place փաթեթավորման մեքենա, palletizer, ռոբոտների ինտեգրման կիրառություն, բեռնման և բեռնաթափման մանիպուլյատորներ, ստվարաթղթե ձևավորում, ստվարաթղթե կնքում, ծղոտե ներքնակ դիսպենսեր, փաթաթման մեքենա և այլ ավտոմատացման լուծումներ հետնամասային փաթեթավորման արտադրական գծի համար:
Մեր գործարանի տարածքը մոտ 3500 քմ է: Հիմնական տեխնիկական թիմն ունի մեխանիկական ավտոմատացման միջինը 5-10 տարվա փորձ, ներառյալ 2 մեխանիկական նախագծող ինժեներ: 1 ծրագրավորող ինժեներ, 8 հավաքման աշխատող, 4 հետվաճառքից վրիպազերծող անձ և այլ 10 աշխատող
Մեր սկզբունքն է «առաջին հերթին հաճախորդը, առաջին հերթին որակը, առաջին հերթին հեղինակությունը», մենք միշտ օգնում ենք մեր հաճախորդներին «ավելացնել արտադրական հզորությունը, նվազեցնել ծախսերը և բարելավել որակը», մենք ձգտում ենք դառնալ առաջատար մատակարար մեքենաների ավտոմատացման ոլորտում:
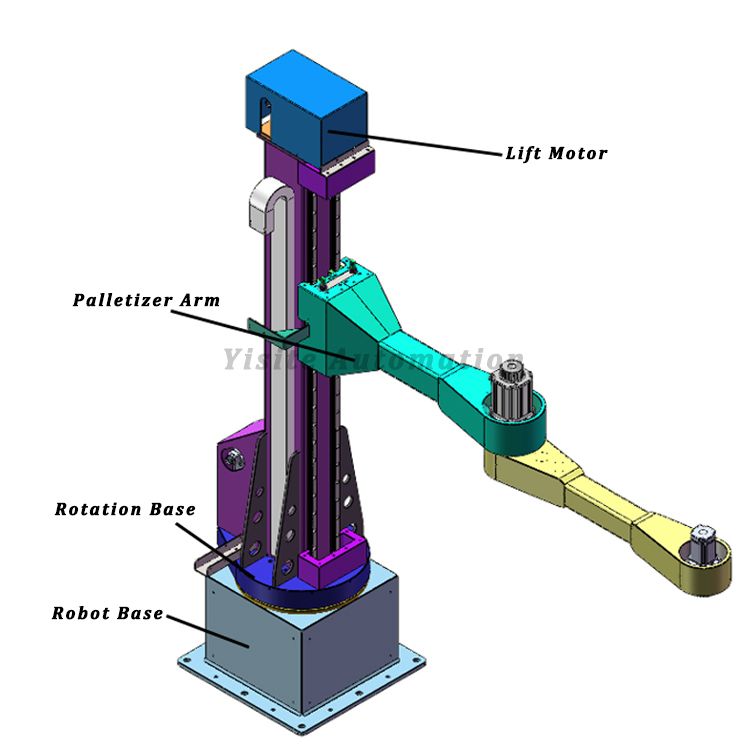
Մալուխային հոսանքի ռոբոտի մանիպուլյատոր
| Մոդել | ԵՍՏ-115 | |
| Մեխանիկական կառուցվածք | Multi-Joint Robot | |
| Կատարման եղանակը | Գլանաձեւ կոորդինատի տեսակը | |
| Բեռնատարողություն | 150 կգ | |
| Գործողությունների արագություն | 1200/Հ | |
| Շարժման առանցք | 4 առանցք | |
| Գործարկման միջակայք | Z առանցք (վերև ներքև) | 1500 մմ |
| Y առանցք (առջևի հետև) | 2000 մմ | |
| θ առանցք (աջ ձախ) | 330° | |
| α առանցք (Gripper) | 330° | |
| Փոխադարձ ճշգրտություն | ± 1 մմ | |
| Էլեկտրաէներգիայի սպառում | 7,5 կՎտ | |
| Մարմնի քաշը (առանց հարմարանքի) | 550 կգ | |
Ապրանքի մանրամասները
Մեկ սյունակ պալետիզատորի ֆունկցիոնալ առանձնահատկություններ.
1.Ռոբոտի հատուկ համակարգ, սենսորային շահագործման էկրան, հեշտ է գործել:
2. Պարզ կառուցվածք, ձախողման ցածր մակարդակ, հեշտ է վերանորոգել և պահպանել:
3. Մի քանի հիմնական մասեր, մի քանի պարագաներ, ցածր պահպանման ծախսեր:
4. Փոքր ոտնահետք, կարող է հարմարվել տարբեր աշխատանքային միջավայրերին:
5. Բարձր անվտանգություն, շարունակական և երկար ժամանակ կայուն շահագործում:
Single Column Palletizer Կիրառելի դաշտեր
1. Քիմիական, շինանյութերի, կերերի, սննդի, խմիչքների, գարեջրի, ավտոմատացված լոգիստիկայի և այլ արդյունաբերություններ՝ տարբեր բռնիչներով:
2. Այն կարող է իրականացնել տարբեր արդյունաբերություններում պատրաստի արտադրանքի տարբեր ձևերի հավաքումն ու ծալքավորումը:
Single Column Palletizer Կիրառելի փաթեթավորման ձևեր.
Պայուսակներ, տուփեր, բանկա, շշեր (կարելի է հարմարեցվել ըստ օգտագործողի ոչ ստանդարտ բռնիչի):
Single Column Palletizer Palletizing ձեւ:
Ճկուն է, որպեսզի բավարարի կայքի տարբեր պալետավորման պահանջները, ոչ ստանդարտ ծղոտե ձևավորումը կարող է կատարվել ըստ օգտագործողի պահանջների:







