
Պաշտպանիչ ռոբոտը բաղկացած է սյունակի շրջանակից, X առանցքի բաղադրիչից, Y առանցքի բաղադրիչից, Z առանցքի բաղադրիչից, հարմարանքից և կառավարման տուփից:
Այն լիովին ավտոմատ արդյունաբերական սարքավորում է, որը հիմնված է ուղղանկյուն X, Y, Z եռաչափ կոորդինատային համակարգի վրա, որը կարող է հարմարեցնել աշխատանքային մասի դիրքը կամ իրականացնել աշխատանքային մասի հետագիծ շարժումը: Դրա վերահսկման միջուկն իրականացվում է արդյունաբերական կարգավարների միջոցով:
Կարգավորիչը վերլուծում և մշակում է տարբեր մուտքային ազդանշաններ, կատարում տրամաբանական դատողություններ, այնուհետև կատարման հրամաններ է տալիս յուրաքանչյուր ելքային բաղադրիչին, որպեսզի ավարտի X, Y և Z առանցքների միջև համատեղ շարժումը և իրականացնելու լիովին ավտոմատ շահագործման գործընթացների ամբողջական փաթեթը:
Այն օգտագործվում է արտադրանքի հավաքման և փոխադրման, փոխակրիչների համակարգերում և անօդաչու աշխատատեղերում: Այն կարող է օգտագործվել որպես կարևոր ծայրամասային սարքավորում ժամանակավոր պահեստավորման և լոգիստիկայի համար և կարող է ճկուն կերպով համադրվել հյուրընկալող սարքավորումների հետ՝ հեշտ օգտագործման համար: Կիրառական արդյունաբերություններ, որոնք ներգրավված են արտադրանքի վերջնական հավաքման, ենթահավաքման, վերամշակման, փորձարկման, վրիպազերծման և փոխադրման մեջ և այլն:
Ապրանքի առանձնահատկությունները պետք է օգնեն հաճախորդներին լուծել ցածր արդյունավետության կամ բեռնաթափման բարձր ռիսկերի խնդիրները տարբեր տեսակի նյութերի մշակման ժամանակ, որպեսզի հարմար և արագ նվազեցնեն բեռնաթափման ռիսկերը, խնայեն ժամանակ, ջանք, խնայեն աշխատուժը և նույնիսկ փոխարինեն աշխատուժը:
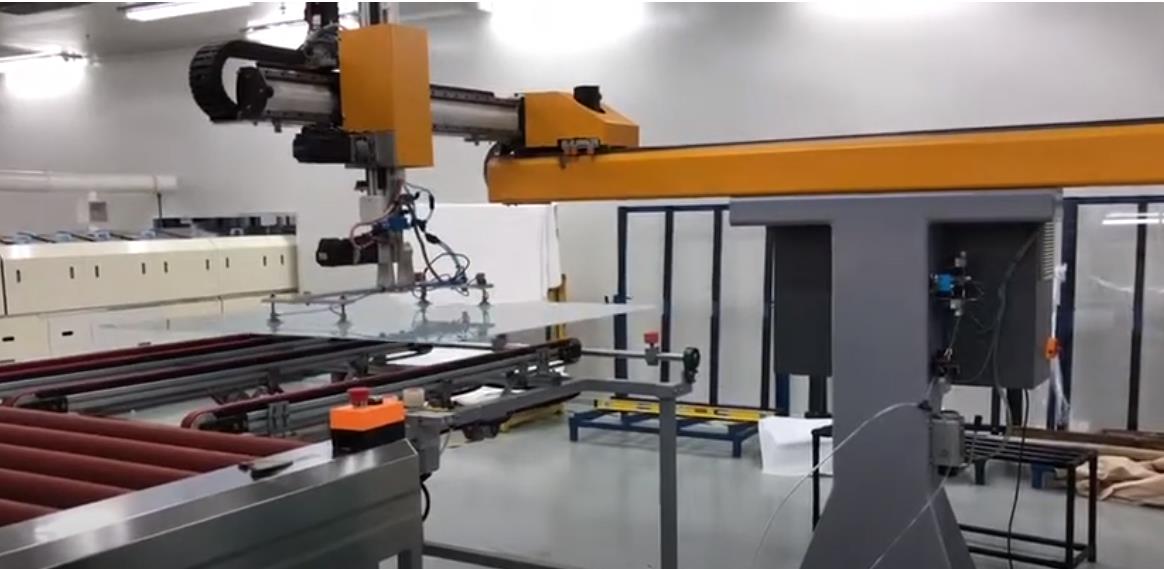
 Ապակիների համար նախատեսված այս երթևեկելի ֆերմայի մանիպուլյատորը ներառում է սյուներ և խաչմերուկներ, որոնք տեղադրված են սյուների վրա: Խաչաձեւ ճառագայթները տեղադրվում են սլայդ ռելսերով: Սլայդերի ռելսերը տեղադրվում են լայնակի սահող սարքով։ Լայնակի սահող սարքը տեղադրվում է ուղղահայաց սահող սարքով և օդաճնշական ներծծող սարքով։ Այն կարող է իրականացվել: Տրանսպորտային մեխանիզմը շարժվում է եռաչափ տարածության ֆիքսված կետում, ներծծում է ապակին ներծծող բաժակի միջով, նախ շարժվում է կողային X առանցքի վրա, այնուհետև շրջում 90 աստիճանով դեպի նշանակված դիրքը, այնուհետև շարժվում վերև: և ներքև՝ Y առանցքի վրա: Սահմանված դիրքին հասնելուց հետո բաց թողեք ապակին և դրեք ապակե դարակի վրա։ Ամբողջ սարքի կառուցվածքային կայունությունը շատ բարձր է, ինչը մեծապես բարելավում է բեռնաթափումը: արդյունավետությունը։
Ապակիների համար նախատեսված այս երթևեկելի ֆերմայի մանիպուլյատորը ներառում է սյուներ և խաչմերուկներ, որոնք տեղադրված են սյուների վրա: Խաչաձեւ ճառագայթները տեղադրվում են սլայդ ռելսերով: Սլայդերի ռելսերը տեղադրվում են լայնակի սահող սարքով։ Լայնակի սահող սարքը տեղադրվում է ուղղահայաց սահող սարքով և օդաճնշական ներծծող սարքով։ Այն կարող է իրականացվել: Տրանսպորտային մեխանիզմը շարժվում է եռաչափ տարածության ֆիքսված կետում, ներծծում է ապակին ներծծող բաժակի միջով, նախ շարժվում է կողային X առանցքի վրա, այնուհետև շրջում 90 աստիճանով դեպի նշանակված դիրքը, այնուհետև շարժվում վերև: և ներքև՝ Y առանցքի վրա: Սահմանված դիրքին հասնելուց հետո բաց թողեք ապակին և դրեք ապակե դարակի վրա։ Ամբողջ սարքի կառուցվածքային կայունությունը շատ բարձր է, ինչը մեծապես բարելավում է բեռնաթափումը: արդյունավետությունը։

Հրապարակման ժամանակը՝ Մար-18-2024



